|
|

|

|
| e-Pub |
Section: New Results
Marked point processes
Integrating RJMCMC and Kalman filters for multiple object tracking
Participants : Paula Craciun, Josiane Zerubia [contact] .
This work has been done in collaboration with Dr. Mathias Ortner from Airbus D&S [http://www.space-airbusds.com/fr/ ]
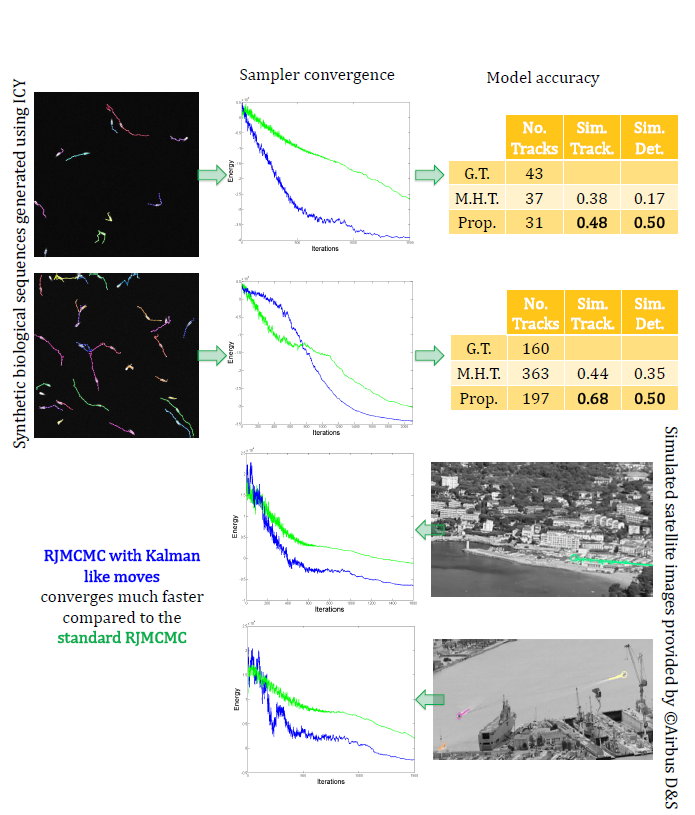
Recently, we have proposed a new spatio-temporal marked point process model for tracking small, rigid objects in high resolution images. We have shown very good detection and tracking results for synthetic biological data as well as remotely sensed sequences. The model is based on defining a dedicated energy function that is highly non-convex. The solution is found by minimizing this energy function using a suitable batch-optimization scheme based on Reversible Jump Markov Chain Monte Carlo (RJMCMC) sampler. This approach is motivated by the low temporal frequency of the sequences (1Hz).
Sequential filters have proven to provide relatively fast and reliable tracking performances in particular for single target tracking. We have efficiently exploited the properties of sequential filters within the RJMCMC sampling scheme. The filter is used to generate more meaningful perturbation proposals which are then evaluated using an appropriate Green acceptance ratio. Better perturbation proposals increase the acceptance probability of the overall RJMCMC sampling scheme which in turn leads to a faster convergence.
Figure 2 shows the detection and tracking results on two synthetic biological sequences as well as on two sequences of simulated satellite images of Toulon by courtesy of Airbus Defence & Space, France. The evolution of the energy with the number of iterations for the standard RJMCMC sampler and the proposed sampler is also shown. The proposed sampler is depicted blue.
|
Initialization and estimation of parameters for marked point processes applied to automatic object detection on satellite images
Participants : Aurélie Boisbunon, Josiane Zerubia [contact] .
This work has been done in collaboration with Dr. Rémi Flamary (Université de Nice Sophia Antipolis), Prof. Alain Rakotomamonjy (Université de Rouen) et Alain Giros (CNES). It was partially funded by the French Spatial Agency CNES [http://www.cnes.fr ].
Sparse representations, large scale, stochastic algorithms, machine learning, image processing Marked point processes (MPP) strongly rely on parameters, whose estimation affects both computation time and performances. In this work, we proposed two approaches: the first one consists in initializing MPPs with a first coarse solution obtained very quickly from sparse regularization methods, while the second one estimates the parameters by the Stochastic Approximation Expectation-Maximization (SAEM) algorithm. We give details on both approaches below. The first coarse solution is obtained from a deterministic sparse regularization method. This method is based on the representation of an image with objects as a sum of convolutions between atoms of a dictionary and matrices of positions of the objects in the image. The atoms of the dictionary are fixed in advance and correspond to different instances of the objects (scales, angles, shapes, etc). This way, we transform the problem of object detection into the problem of estimating extremely sparse matrices. The algorithm we derived for solving the associated optimization problem is both parallelized and very efficient. This work started last year, and continued this year by conducting more tests.
Generic curvilinear structure modeling via marked point process theory
Participants : Seong-Gyun Jeong, Yuliya Tarabalka, Josiane Zerubia [contact] .
This work has been done in collaboration with Dr. Nicolas Nisse (COATI team [https://team.inria.fr/coati/ ], Inria-SAM) and Dr. Yuliya Tarabalka (Titane team [https://team.inria.fr/titane/team/ ], Inria-SAM)
We propose a novel curvilinear structure reconstruction algorithm based on ranking learning and graph theory. In this work we reconstruct the curvilinear structure as a set of small line segments (via MPP). Specifically, we infer the structured output ranking of the line segments via Structured Support Vector Machine(SSVM). To predict the existence of the curvilinear structure, we measure oriented image gradient maps and morphological profiles. We propose an orientation-aware curvilinear feature descriptor and a feature grouping operator to improve the structural consistency for learning system. In order to provide topological information, we develop a graph-based curvilinear structure reconstruction algorithm. The proposed algorithm builds a graph based on the output ranking scores and searches the longest geodesic paths which are associated with the latent curvilinear structure. Experimental results (see Figure 3 ) show that the proposed algorithm faithfully detects the curvilinear structures and preserves topological information compared with the competing algorithms.
|